

Research Project Proposal Draft
Contextualization
“Analysis of the results showed that people significantly prefer soft, warm hugs over hard, cold hugs. Furthermore, users prefer hugs that physically squeeze them and release them immediately when they are ready for the hug to end. Taking part in the experiment also significantly increased positive user opinions of robots and robot use” (Alexis 1).
“Indeed, Lakoff and Johnson have suggested that these two experiences go hand in hand: because we receive them simultaneously so often as children, when we experience physical warmth (a warm hug or being wrapped in a blanket), we associate it with feelings of social warmth (love)” (Alexis 5).
“The Hug is covered with velour and silk upholstered fabrics that are familiar and fit the home context. The Hug does not look “out of place” on a couch or a bed. The surface materials of the Hug also support interaction. The textiles were specifically chosen to encourage intimate touch in the form of petting; they are smooth and distinctive. Most importantly, The Hug is soft, allowing it to be firmly embraced and molded to comfortably fit a range of body shapes and postures for cuddling” (Trovato 8).
“Design physical shapes to reference a human gesture associated with a specific form of intimate communication. These shapes are recognizable, informative, and welcoming; they, enhance comfort and ease of use. Referencing a human gesture (for example, a hug, a kiss, or a whisper) allows for an appropriate level of. embodiment without reverting to purely representational anthropomorphic form. The outstretched arms of The Hug are the same as the outstretched arms of any person – requesting a hug, naturally directing how The Hug is held and used” (Trovato 13).
“In this paper, we presented a study of human-robot physical interaction intended to provide findings on robot design. The experiment consisted in having participants hug the humanoid robot ARMAR-IIIb while manipulating one variable regarding appearance, presenting the robot with or without clothes covering wires and metallic parts, and one variable about the auditory field, disabling or enabling the control of the hand, which generates noise. Results highlighted the positive effect of using clothes to modify the appearance and the negative effect of noise. Given the participant’s behavior, we can conclude that other aspects not examined in this study still contribute to the feeling of anxiety in hugging interaction; however, the present findings also highlighted the importance of auditory perception and the need for user-friendly design of robots that have to be used in close interaction. In order to generalize these findings, future works include the repetition of the experiment with different kinds of humanoids including a comparison with androids, whose appearance is different enough to imply different uncanny perceptions, different expectations of robot intelligence, and different sense of touch during hugging interaction. Additional investigation will also be carried out on analyzing the sound in order to determine what causes an uncanny effect and to find an appropriate filter that nullifies it” (DiSalvo 19).
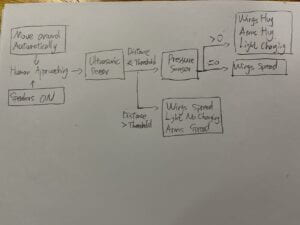
These are the main functionality we wish to realize through the design of the hugging robot. We haven’t given it a name yet, but I am sure it will be cute and approachable. I think it should be able to move around by itself and whenever there is someone getting closer to it, it will spread its wings and arms to welcome that person. When the pressure sensor detects someone is hugging its huge furry body, it will use wings and arms to hold the person, meanwhile, the angle collar will be lightened to make the scene sweeter.
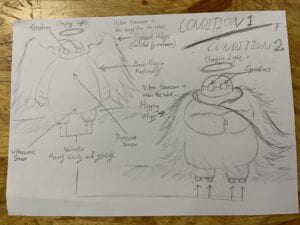
This is what it looks like in my imagination. Of course, the specific structure of the wings requires further research and the attachment material also matters a lot.
References
Block, A.E., Kuchenbecker, K.J. Softness, Warmth, and Responsiveness Improve Robot Hugs. Int J of Soc Robotics 11, 49–64 (2019). https://doi.org/10.1007/s12369-018-0495-2
G. Trovato et al., “Is hugging a robot weird? Investigating the influence of robot appearance on users’ perception of hugging,” 2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids), 2016, pp. 318-323.
C. DiSalvo, F. Gemperle, J. Forlizzi, and E. Montgomery, “The Hug: an exploration of robotic form for intimate communication,” The 12th IEEE International Workshop on Robot and Human Interactive Communication, 2003. Proceedings. ROMAN 2003., 2003, pp. 403-408.