

Escaping robot
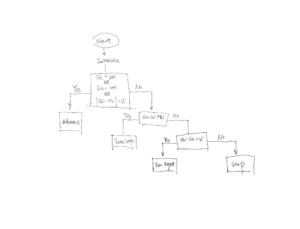
In this exercise, we add two light-dependent resistors on each side of the breadboard to simulate the eyes of a bug. Whenever the illumination intensity is beyond one certain level, it will begin to move forward. In terms of turning the direction, we measure the absolute value of the difference between 2 resistors. And base on this value, we can easily determine the right way to go.
The following is the flow chart of the code.
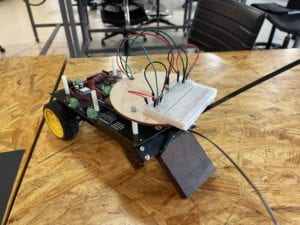
We add a circular platform on top of it to hold the breadboard.
And this is what it looks like with the add-on.
This is the demo video me leading the way of it.
And here are the codes.
int E1 = 5; //M1 Speed Control int E2 = 6; //M2 Speed Control int M1 = 4; //M1 Direction Control int M2 = 7; //M1 Direction Control void stop(void) //Stop { digitalWrite(E1, LOW); digitalWrite(E2, LOW); } void advance(char a, char b) //Move forward { analogWrite (E1, a); //PWM Speed Control digitalWrite(M1, HIGH); analogWrite (E2, b); digitalWrite(M2, HIGH); } void back_off (char a, char b) //Move backward { analogWrite (E1, a); digitalWrite(M1, LOW); analogWrite (E2, b); digitalWrite(M2, LOW); } void turn_L (char a, char b) //Turn Left { analogWrite (E1, a); digitalWrite(M1, LOW); analogWrite (E2, b); digitalWrite(M2, HIGH); } void turn_R (char a, char b) //Turn Right { analogWrite (E1, a); digitalWrite(M1, HIGH); analogWrite (E2, b); digitalWrite(M2, LOW); } void setup(void) { int i; for (i = 4; i <= 7; i++) pinMode(i, OUTPUT); Serial.begin(19200); //Set Baud Rate //Serial.println("Run keyboard control"); } void loop(void) { //100 is the min int sensorValue1 = analogRead(A0); int sensorValue2=analogRead(A1); Serial.println(sensorValue1); Serial.println(sensorValue2); delay(1); if(sensorValue1<300 && sensorValue2 <300 && abs(sensorValue2-sensorValue1)<35 ){ advance(255, 255); delay(1); }else if(sensorValue2-sensorValue1 > 35 ){ turn_R(100,100); delay(50); }else if(sensorValue1-sensorValue2 > 35){ turn_L(100,100); delay(50); }else{ stop(); } }
This is the final mission and we successfully escape the labyrinth.