

Recitation 4 : Johnny
Before answering questions, I would like to briefly talk about the process of building the drawing machine. When looking at the diagram, I am a little bit worried about whether I can successfully build it or not because honestly, this is the most complicated one I have encountered. And also I have to pay extra attention to whether the power is correctly connected otherwise, it may burn out my computer. I have witnessed such tragedy in my class in person, so I am nervous before the installation. While, after I began, the process is not as hard as I have imagined and I only spent around 10 minutes to make it work. Though the wires are entwined with one another, making it a little bit ugly, it works well.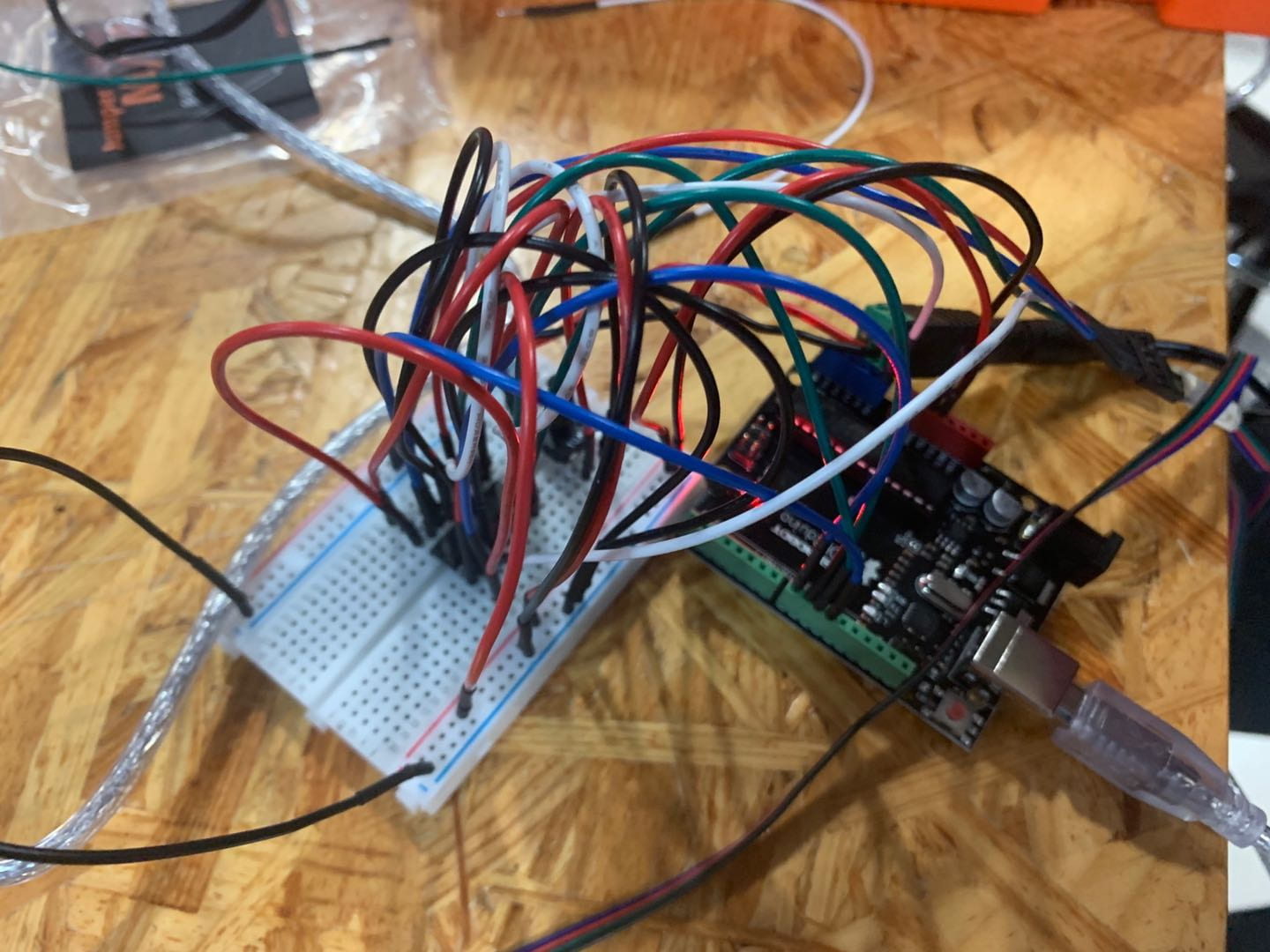
After I have finished building mine, I try to give others a hand. While I find my deskmate’s computer cannot find her Arduino and I realized that something was going wrong with her Arduino. So we call the professor for help and find there is a short there and she needs to change one because the one she is using now has already been burned. Sad story. And then I join another group to together create a piece of artwork.
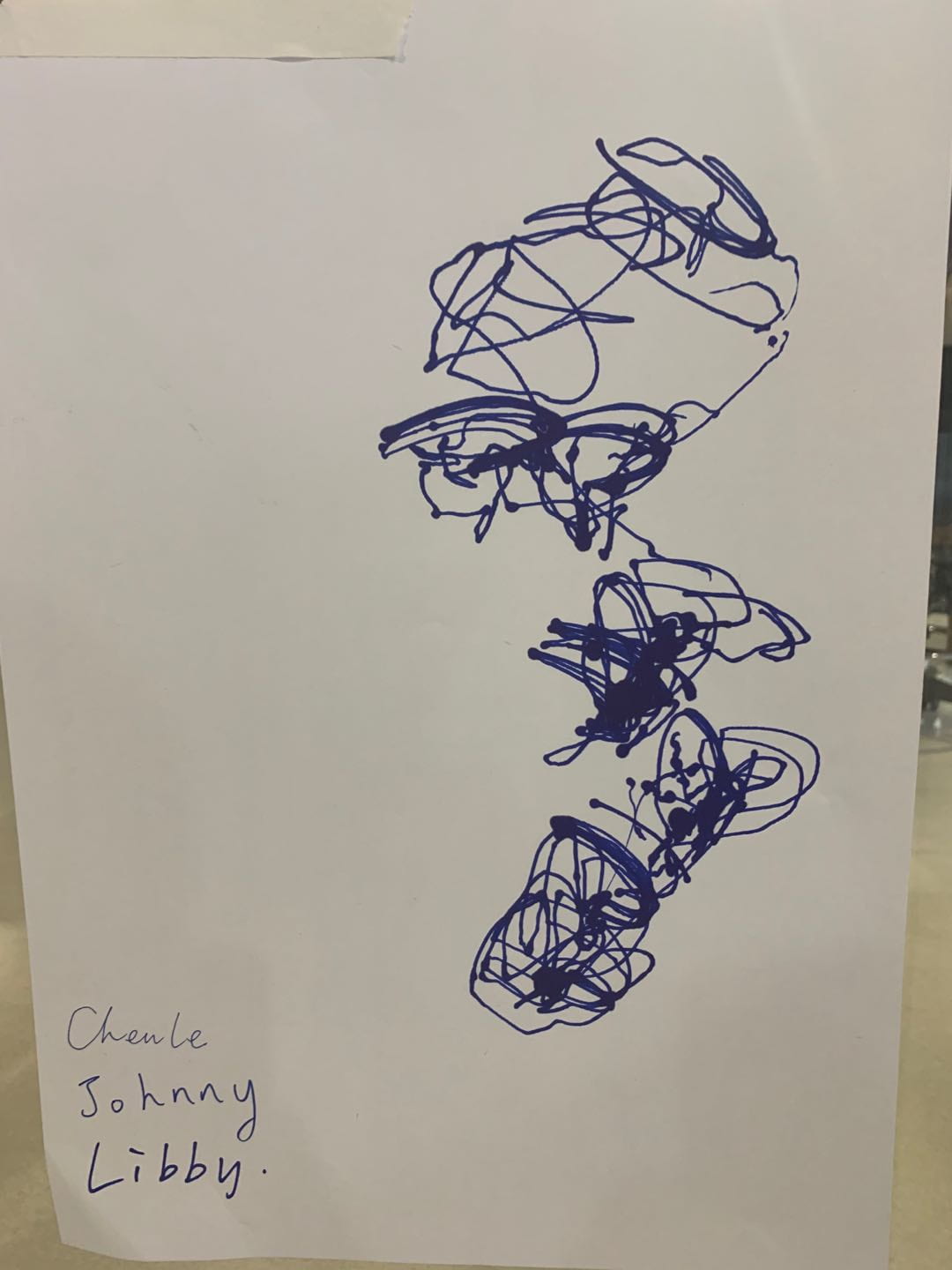
This is the final look of the masterpiece created by our drawing machine.
A to Q1
Personally, I am very interested in building machines that can detect their surroundings and then give a response. And they look like real fantasy creatures. The idea is very similar to the last video showed in the Thursday class introducing the Korean artist, who can create lots of fantasy and future-like living things. The reason I want to build such machines is also very simple. They are cool. And since I was a kid, I am always a boy being eager to make these fantasy stories and creatures in my mind come true. When I was a kid, I use Lego and now I have been a grown-up, I can use more advanced techniques to build them. For example, I might choose photoconductive resistance as one of the sensors which can detect the change of the surroundings. In response, I need to have a whole set of mechanical transmission to make the machine( I prefer to call it a creature)move and in this way, you can feel the power of life containing in its seemingly cold mechanic body. This is the most basic idea, I think to make it fully responsive to the environment, lots of sensors are required, such as airborne sensors, infrared sensors, and so on. In my dream, the outcome of it is really close to present animals. For example, you can imagine the audience use their fingers to touch this creature, though having a cooler and more fantastic mechanic body, they may lean in like a kitten and dally with your fingers. It will automatically move around in this place and being interactive to both environmental changes and other creatures as well.
A to Q2
The most eye-catching machine for me is the Exoskeleton created by Stelarc in 2003. I think it is really interesting. The most exciting part about it is that it provides humans with an opportunity to feel the surroundings in another creature’s way. For instance, in this project, the experience is probably the most likely to live as a spider. In recent years, UAV is very popular and I think UAV shares a key feature with Exoskeleton, which is enabling people to see things uniquely. For this project, I think it contains lots of actuators than I have known. But each of them is based on a very basic principle, which is to make this whole machine responsive to the environment. Particularly, in this one, it needs to detect whether there is a human standing on the top of it. To meet this requirement, it might use a pressure sensor. When it detects there is a human standing on it, it needs to make his 6 legs move. To do that, we need a carefully designed mechanical transmission system and powerful steppers. It may also involve other actuators and sensors. I can imagine that it might is also possible to respond to a human’s movement as well. If you lift your arm, it is going to climb up or something like that. Comparing it with the drawing machine we have built, the underlying working mechanism is the same. In the drawing machine case, we use the rheostat to control the rotation of the stepper. While in the Exoskeleton case, it responds to the movement of humans. Of course, they still have tons of difference, the Exoskeleton is far more complicated than the drawing machine. For us, the mechanical transmission system is very simple and it only contains two boards. And also we need only. to respond to one variable, the Exoskeleton needs to calculate lots of variables and then give the feedback based on the result of it. I am really excited to have the chance to see one of these amazing mechanisms one day in person.