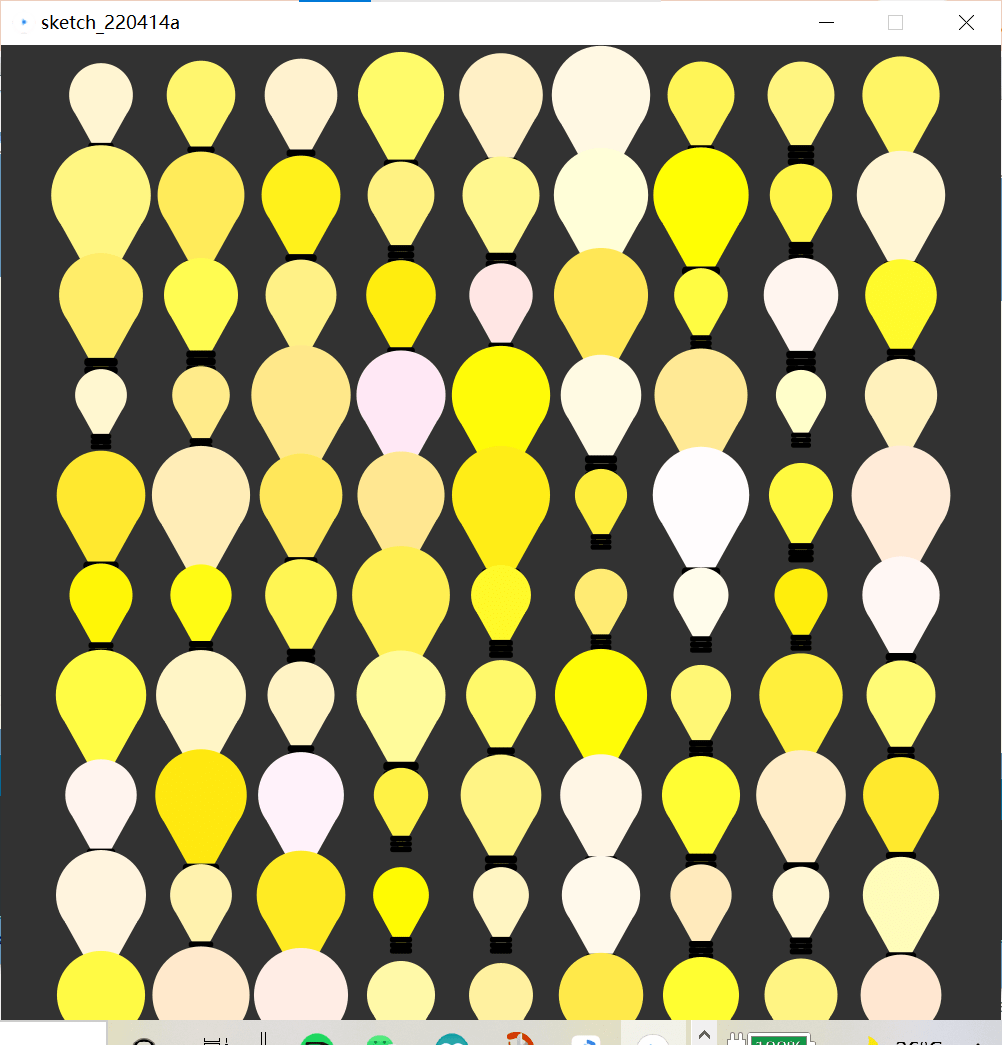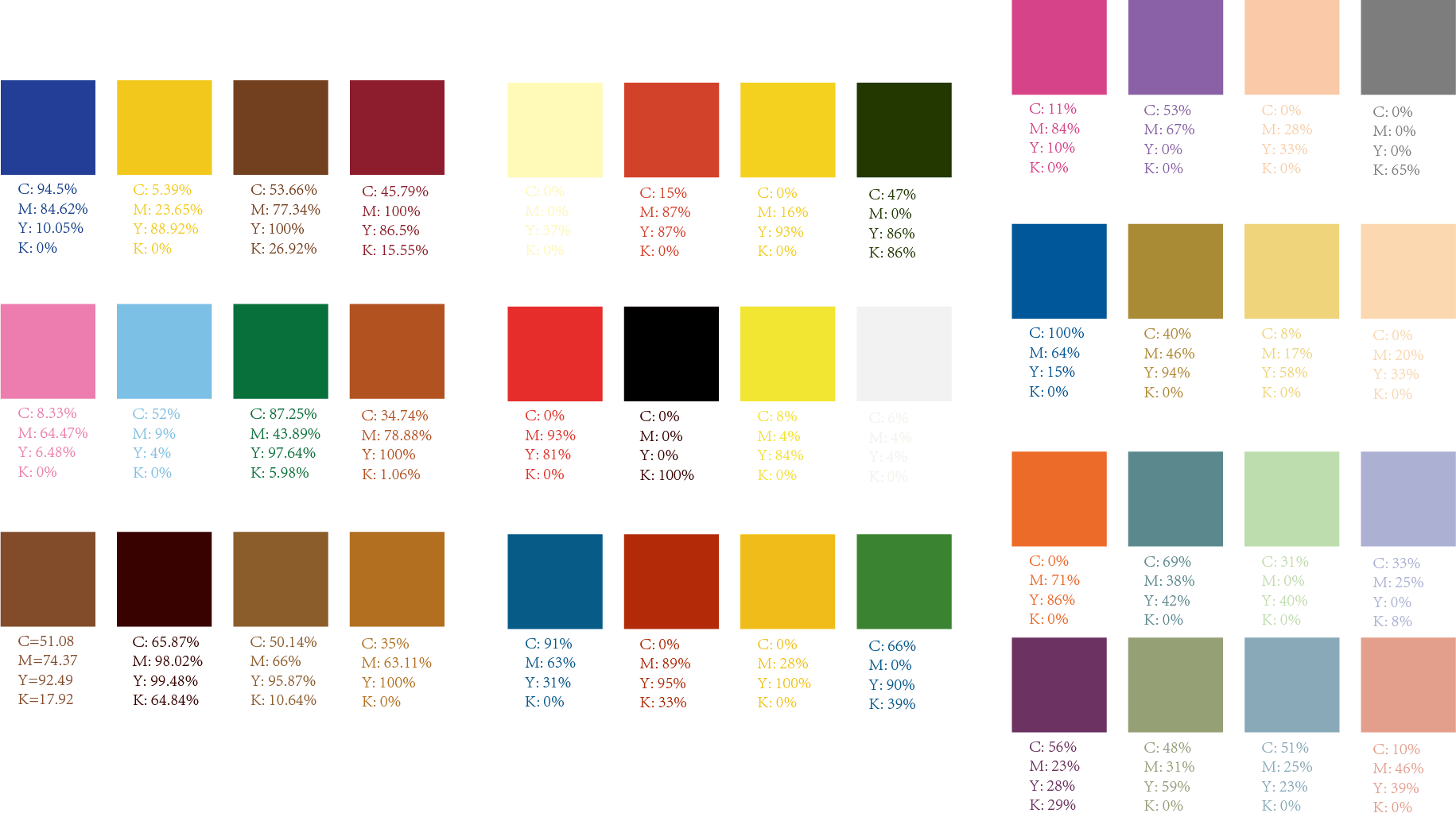
Some color schemes are inspired from random stuff in my dorm room when I was making them. Some are corresponds to the movie and cartoons I’ve watched. For example, the first group at the up right corner is from the Disney movie Beauty and the Beast, and the middle one on the sencond column is from the Disney cartnoon Mickey Mouse. Some are from famous paintings. For instance the two in the middle of the right column are reference from Girl with a Pearl Earring and Impression Sunrise.