
In this recitation, my partner and I learned to use H-Bridge and stepper motors while creating a drawing machine. Following the instructions, we finished the process in three steps: building the hardware circuit, controlling the rotation of the drawing machine with a potentiometer, and finally building a drawing machine.
New Components:
- 42STH33-0404AC stepper motor – it can rotate with divided steps;
- L293D ic chip (H-bridge) – it is an electronic circuit that drives motors and controls them to rotate in different directions.
In steps 1 and 2, my partner and I worked separately on the two stepper motors. I did not encounter many difficulties while connecting the hardware circuits according to the given diagram.
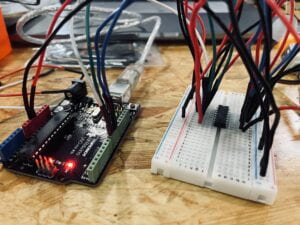
Here is the first attempt to run the circuit:
Now, problems started to occur after I uploaded the code to the Arduino board. The stepper motor was vibrating instead of rotating smoothly. I double-checked and triple-checked my circuit connections, but there was nothing wrong with them. I then thought either the stepper motor or the H-bridge was broken, so I changed both components. Yet, the stepper motor was still malfunctioning. So I asked Eric for help. He rechecked my connections and suggested I change the components again. Finally, it turned out I just had two broken H-bridge in a role.
It could get very frustrated with building circuits sometimes because we do not even know the problem. The debugging process requires extra patience and time spent to look for the problem. If a similar situation happens in our mid-term project, I have to maintain a positive mentality.

As we moved on to Steps two and three, we added the potentiometer, modified the code, and connected the layer-cut arms according to the recitation instruction.
Then, we assembled all the components to build a drawing machine.
Here is the code:
#include <Stepper.h> // change this to the number of steps on your motor #define STEPS 200 // create an instance of the stepper class, specifying // the number of steps of the motor and the pins it's // attached to Stepper stepper(STEPS, 8, 9, 10, 11); // the previous reading from the analog input int previous = 0; void setup() { // set the speed of the motor to 30 RPMs stepper.setSpeed(30); } void loop() { // get the sensor value int val = analogRead(0); int newStep = map(val, 0, 1023, 0, 200); stepper.step(newStep - previous); // remember the previous value of the sensor previous = newStep; }
Here is our attempt with the drawing machine:
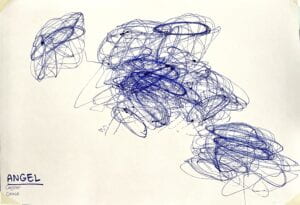
The first attempt was quite successful because both of the stepper motors were working. We realized that if we did not control the drawing machine by rotating the potentiometer or moving the paper, the machine would draw the same pattern repetitively at the same place. It was also hard to manipulate the machine to draw a realistic shape. So, when we are creating our final “art piece” with the drawing machine, we aimed for abstract expressionist art.
Here is our artwork “Angel”:
Question 1: What kind of machines would you be interested in building? Add a reflection about the use of actuators, the digital manipulation of art, and the creative process to your blog post.
According to our experience of building the drawing machine in recitation, I think the digital manipulation of art requires adequate technological knowledge that can back up the numerous possibilities and unexpected yet interesting factors in art. A concept of digital manipulation of art that interests me a lot was the unexpected elements while creating art. However, in the digital world of computation, the machines only follow the strict, one-direction instruction through codes. Art, for me, should embed some subtle meanings, but machines can only create patterns rather than artful images that are produced intentionally for a particular purpose. I think using digital computation as a form of art is more artful than creating a machine that does art because the machines cannot generate creativity and imagination.
Due to this restriction of machines creating art, I am interested in creating a machine that can analyze the relationship between the several participants in the interaction and paint out corresponding abstract, expressive images representing their relationships.
Question 2: Choose an art installation mentioned in the reading ART + Science NOW, Stephen Wilson (Kinetics chapter). Please post your thoughts about it and make a comparison with the work you did during this recitation. How do you think that the artist selected those specific actuators for his project?
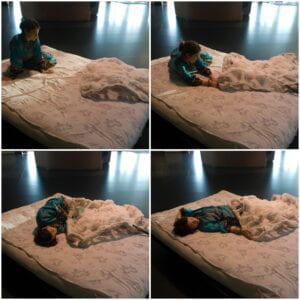
From ART + Science NOW, Stephen Wilson (Kinetics chapter), I was most intrigued by Blanket Project by Nicholas Stedman. I think this is particularly interesting because it gives life to the ordinary things that we use in daily life and tends to overlook. By granting the blanket the ability to sense the presence of viewers, Stedman navigated through space, sought out individuals, and gave a new conception to normality. Compared to the monotonous, one-direction interaction experience, Blanket Project provides the space and possibility for the viewers to explore their unique experiences with the blanket. They can even dance with the blanket, have intimate encounters with it, treat the blanket as a pet, or remain as an animated household object. I like the involvement of the high level of activity in this project – how it can sense and react autonomously.
Both of the works use portable devices that can form physical movements. My drawing machine uses laser-cut arms as the significant movement support, paper fasteners and 3D printed motor fastener as joins, and pen holder as hands. Powered by the rotation of the two stepper motors, the structure may perform the movements. Similarly, controlled by a PIC-based control circuit, the aluminum skeleton wrapped in foam and fabric is animated by servos. Also, both of the projects have the movement controlled by a person. A person remotely controls the movement of the blanket; my project, similarly, also requires human control to manipulate the motor rotation. I think the artist select the actuators because the servo motors can best achieve the autonomous movements of the blanket, especially it has a relatively flat shape and soft texture. The artist chose to use the combination of various servos to enable the movement in all kinds of directions.
Citations
“The Blanket Project.” Hackaday.io, https://hackaday.io/project/246-the-blanket-project.
“Nicholas Stedman: The Blanket Project.” ISEA Symposium Archives, https://isea-archives.siggraph.org/art-events/nicholas-stedman-the-blanket-project/.