For the complete and updated list of publications please consult Google Scholar.
2023
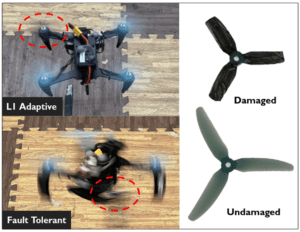
From Propeller Damage Estimation and Adaptation to Fault Tolerant Control: Enhancing Quadrotor Resilience
J. Mao, J. Yeom, S. Nair, G. Loianno
Paper Video
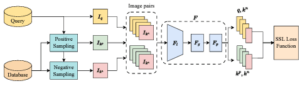
Visual Geo-localization with Self-supervised Representation Learning
J. Xiao, G. Zhu, G. Loianno
Paper Code
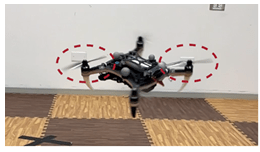
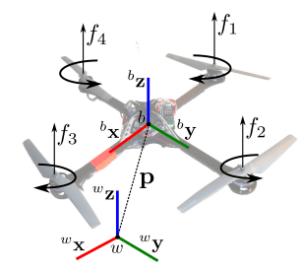
Geometric Fault-Tolerant Control of Quadrotors in Case of Rotor Failures: An Attitude Based Comparative Study
J. Yeom, G. Li, G. Loianno
IEEE International Conference on Intelligent Robots and Systems (IROS)
Paper Video
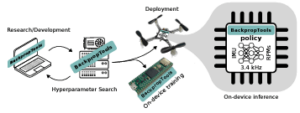
BackpropTools: A Fast, Portable Deep Reinforcement Learning Library for Continuous Control
J. Eschmann, D. Albani, G. Loianno
Paper
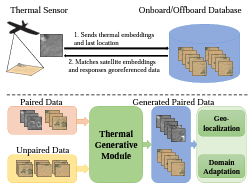
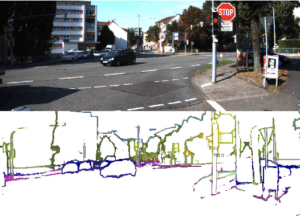
Long-range UAV Thermal Geo-localization with Satellite Imagery
J. Xiao, D. Tortei, E. Roura, G. Loianno
IEEE International Conference on Intelligent Robots and Systems (IROS)
Paper Code

AutoCharge: Autonomous Charging for Perpetual Quadrotor Missions
A. Saviolo, J. Mao, R. Balu TMB, V. Radhakrishnan, G. Loianno
IEEE International Conference on Robotics and Automation (ICRA)
Paper Video
Learning quadrotor dynamics for precise, safe, and agile flight control
A. Saviolo, G. Loianno
Annual Reviews in Control
Paper

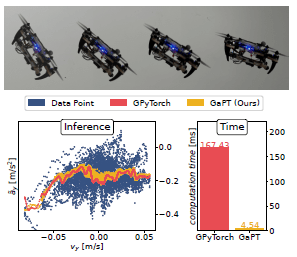
GaPT: Gaussian Process Toolkit for Online Regression with Application to Learning Quadrotor Dynamics
F. Crocetti, J. Mao, A. Saviolo, G. Costante, G. Loianno
IEEE International Conference on Robotics and Automation (ICRA)
Paper Video Code

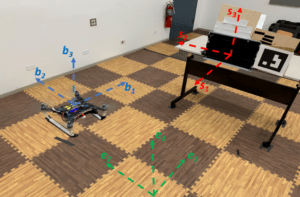
Nonlinear Model Predictive Control for Cooperative Transportation and Manipulation of Cable Suspended Payloads with Multiple Quadrotors
G. Li, G. Loianno
IEEE International Conference on Intelligent Robots and Systems (IROS)
Paper Video
2022

Active Learning of Discrete-Time Dynamics for Uncertainty-Aware Model Predictive Control
A. Saviolo, J. Frey, A. Rathod, M. Diehl, G. Loianno
IEEE Transactions on Robotics (T-RO)
Paper Video
![]()
Safety-Aware Human-Robot Collaborative Transportation and Manipulation with Multiple MAVs
G. Li*, X. Liu*, G. Loianno
Paper Video
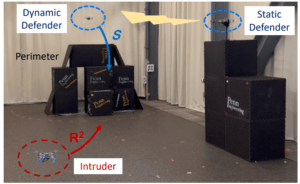
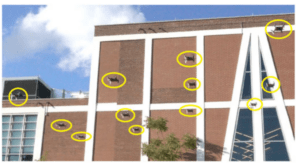
Vision-based Perimeter Defense via Multiview Pose Estimation
E. Lee, G. Loianno, D. Jayaraman, V. Kumar
Paper
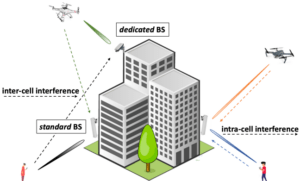
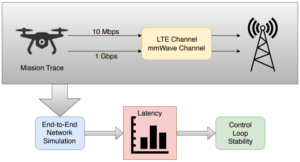
Coexistence of UAVs and Terrestrial Users in Millimeter-Wave Urban Networks
S. Kang, M. Mezzavilla, A. Lozano, G. Geraci, S. Rangan, V. Semkin, W. Xia, G. Loianno
Paper
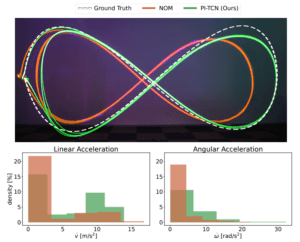
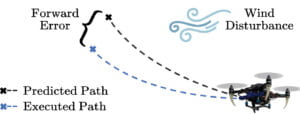
Physics-Inspired Temporal Learning of Quadrotor Dynamics for Accurate Model Predictive Trajectory Tracking
A. Saviolo, G. Li, G. Loianno
IEEE Robotics and Automation Letters (RA-L)
IEEE International Conference on Intelligent Robots and Systems (IROS)
Paper Video
Vision-based Relative Detection and Tracking for Teams of Micro Aerial Vehicles
R. Ge*, M. Lee*, V. Radhakrishnan, Y. Zhou, G. Li, G. Loianno
IEEE International Conference on Intelligent Robots and Systems (IROS)
Paper Video
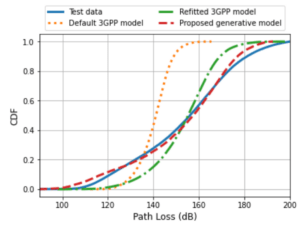
Generative neural network channel modeling for millimeter-wave UAV communication
W. Xia, S. Rangan, M. Mezzavilla, A. Lozano, G. Geraci, V. Semkin, G. Loianno
IEEE Transactions on Wireless Communications (TWC)
Paper
![]()
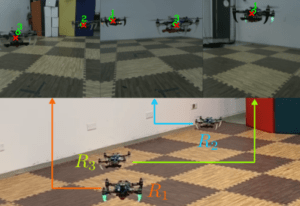
RotorTM: A Flexible Simulator for Aerial Transportation and Manipulation
G. Li, X. Liu, G. Loianno
IEEE Transactions on Robotics (T-RO)
Paper Code
Robust Active Visual Perching with Quadrotors on Inclined Surfaces
J. Mao, S. Nogar, C. Kroninger, G. Loianno
IEEE Transactions on Robotics (T-RO)
Paper
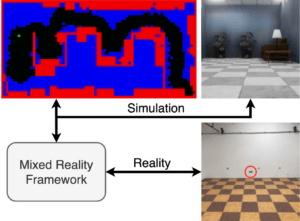
Autonomous Single-Image Drone Exploration With Deep Reinforcement Learning and Mixed Reality
A. Devo, J. Mao, G. Costante, G. Loianno
IEEE Robotics and Automation Letters (RA-L)
IEEE International Conference on Robotics and Automation (ICRA)
Paper
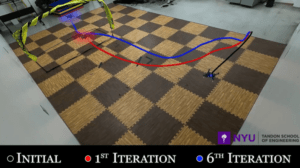
Learning Model Predictive Control for Quadrotors
G. Li*, A. Tunchez*, G. Loianno
IEEE International Conference on Robotics and Automation (ICRA)
Paper Video
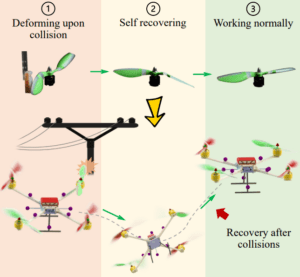
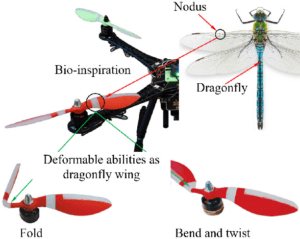
Tombo Propeller: Bio-Inspired Deformable Structure toward Collision-Accommodated Control for Drones
S. T. Bui, Q. K. Luu, D. Q. Nguyen, N. D. M. Le, G. Loianno, V. A. Ho
Paper
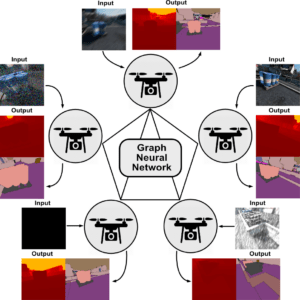
Multi-Robot Collaborative Perception with Graph Neural Networks
Y. Zhou, J. Xiao, Y. Zhou, G. Loianno
IEEE Robotics and Automation Letters (RA-L)
IEEE International Conference on Robotics and Automation (ICRA)
Paper Video
2021
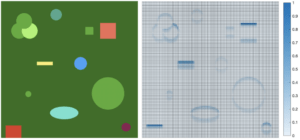
Selective and Hierarchical Allocation of Sensing Resources for Anomalous Target Identification in Exploratory Missions
B. Blakeslee, G. Loianno
IEEE Symposium on Safety, Security, and Rescue Robotics (SSRR)
Paper
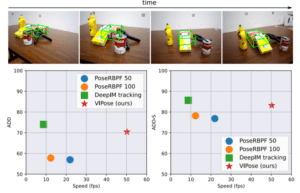
VIPose: Real-time Visual-Inertial 6D Object Pose Tracking
R. Ge, G. Loianno
IEEE International Conference on Intelligent Robots and Systems (IROS)
Paper Video
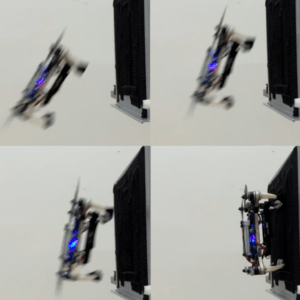
Aggressive Visual Perching with Quadrotors on Inclined Surfaces
J. Mao, G. Li, S. Nogar, C. Kroninger, G. Loianno
IEEE International Conference on Intelligent Robots and Systems (IROS)
Paper Video

PCMPC: Perception-Constrained Model Predictive Control for Quadrotors with Suspended Loads using a Single Camera and IMU
G. Li*, A. Tunchez*, G. Loianno
IEEE International Conference on Robotics and Automation (ICRA)
Paper Video

Cooperative Transportation of Cable Suspended Payloads With MAVs Using Monocular Vision and Inertial Sensing
G. Li, R. Ge, G. Loianno
IEEE Robotics and Automation Letters (RA-L)
IEEE International Conference on Robotics and Automation (ICRA)
Paper Video
![]()
Tracking and Relative Localization of Drone Swarms with a Vision-based Headset
M. Pavliv, F. Schiano, C. Reardon, D. Floreano, G. Loianno
IEEE Robotics and Automation Letters (RA-L)
Paper Video
2020
![]()
Design and Experimental Evaluation of Distributed Cooperative Transportation of Cable Suspended Payloads with Micro Aerial Vehicles
G. Li, G. Loianno
International Symposium on Experimental Robotics (ISER)
Paper Video
FENet: Fast Real-time Semantic Edge Detection Network
Y. Zhou, R. Ge, G. McGrath, G. Loianno
IEEE Symposium on Safety, Security, and Rescue Robotics (SSRR)
Paper Video
Design and Deployment of an Autonomous Unmanned Ground Vehicle for Urban Firefighting Scenarios
K. Jindal, A. Wang, D. Thakur, A. Zhou, V. Spurny, V. Walter, G. Broughton, T. Krajnik, M. Saska, G. Loianno
Paper Video
![]()
Nuclear environments inspection with micro aerial vehicles: Algorithms and experiments
D. Thakur, G. Loianno, W. Liu, V. Kumar
International Symposium on Experimental Robotics
Paper
Observability-Aware Trajectories for Geometric and Inertial Self-Calibration
C. Bohm, G. Li, G. Loianno, S. Weiss
Power On and Go Robots
Paper
Imu-based inertia estimation for a quadrotor using newton-euler dynamics
J. Svacha, J. Paulos, G. Loianno, V. Kumar
IEEE Robotics and Automation Letters (RA-L)
Paper
Towards design of a deformable propeller for drone safety
D. Q. Nguyen, G. Loianno
IEEE International Conference on Soft Robotics (RoboSoft)
Paper

Efficient trajectory library filtering for quadrotor flight in unknown environments
V. K. Viswanathan, E. Dexheimer, G. Li, G. Loianno, M. Kaess, S. Scherer
IEEE International Conference on Intelligent Robots and Systems (IROS)
Paper
2019
Autonomous Inspection of a Containment Vessel using a Micro Aerial Vehicle
D. Thakur, G. Loianno, L. Jarin-Lipschitz, A. Zhou, V. Kumar
IEEE Symposium on Safety, Security, and Rescue Robotics (SSRR)
Paper Video

Online Estimation of Geometric and Inertia Parameters for Multirotor Aerial Vehicles
V. Wüest, V. Kumar, G. Loianno
IEEE International Conference on Robotics and Automation (ICRA)
Paper Video

Inertial Yaw-Independent Velocity and Attitude Estimation for High Speed Quadrotor Flight
V. Wüest, V. Kumar, G. Loianno
IEEE Robotics and Automation Letters (RA-L)
Paper Video

Human Gaze-Driven Spatial Tasking of an Autonomous MAV voice
L. Yuan, C. Reardon, G. Warnell, G. Loianno
IEEE Robotics and Automation Letters (RA-L)
Paper Video
Autonomous inspection of a containment vessel using a micro aerial vehicle
D. Thakur, G. Loianno, L. Jarin-Lipschitz, A. Zhou, V. Kumar
IEEE Symposium on Safety, Security, and Rescue Robotics (SSRR)
Paper

Autonomous landing on a moving vehicle with an unmanned aerial vehicle
T. Baca, P. Stepan, V. Spurny, D. Hert, R. Penicka, M. Saska, J. Thomas, G. Loianno, V. Kumar
IEEE Symposium on Safety, Security, and Rescue Robotics (SSRR)
Paper
Millimeter wave remote UAV control and communications for public safety scenarios
W. Xia, M. Polese, M. Mezzavilla, G. Loianno, S. Rangan, M. Zorzi
IEEE International Conference on Sensing, Communication, and Networking (SECON)
Paper
2018

Inertial velocity and attitude estimation for quadrotors
J. Svacha, K. Mohta, M. Watterson, G. Loianno, V. Kumar
IEEE International Conference on Intelligent Robots and Systems (IROS)
Paper
![]()
Model predictive trajectory tracking and collision avoidance for reliable outdoor deployment of unmanned aerial vehicles
T. Baca, D. Hert, G. Loianno, M. Saska, V. Kumar
IEEE International Conference on Intelligent Robots and Systems (IROS)
Paper
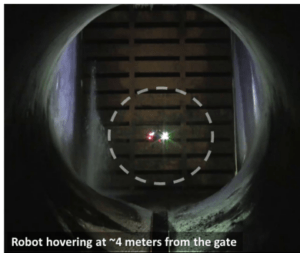
Spatio-temporally smooth local mapping and state estimation inside generalized cylinders with micro aerial vehicles
T. Ozaslan, G. Loianno, J. Keller, C. J. Taylor, V. Kumar
IEEE Robotics and Automation Letters (RA-L)
Paper
Autonomous navigation of micro aerial vehicles using high-rate and low-cost sensors
A. Santamaria-Navarro, G. Loianno, J. Sola, V. Kumar, J. Andrade-Cetto
Autonomous robots
Paper
Visual inertial odometry swarm: An autonomous swarm of vision-based quadrotors
A. Weinstein, A. Cho, G. Loianno, V. Kumar
IEEE Robotics and Automation Letters (RA-L)
Paper