For applying to a project, please fill this form. In general, if you have not received any answer within one week, your application has not been considered.
Last Update: 06/03.

Trajectory Planning and Control for Fixed Wing Vehicles
This project aims to develop innovative motion planning and control techniques for Fixed Wing small aircraft. Given multiple waypoints, or gates, the planes should be able to leverage linear and non linear optimization techniques for the generation of. a safe trajectory that will respect the dynamic constraints of the system. Finally, a controller interface, based on INDI control or NMPC needs to be studied and integrated to perform agile and safe flight also in presence of wind. This project involves 70% testing in our in-home simulator with a 30% of test on the field. The entire pipeline will run on embedded systems.

Model Learning for Cable-Suspended Transportation
This project aims to develop a learning model that can predict the motion of a cable-suspended payload from an on-board downward camera. This model is then used within a model predictive controller for controlling single or multiple aerial systems for payload transportation. This project involves both simulated and real-world experiments, with the learned model running in real-time on the embedded systems.

Thermal Perception and Navigation
This thesis aims to develop and evaluate a novel robotic navigation system that utilizes thermal perception to navigate complex environments. The system will integrate thermal imaging technologies with existing navigational algorithms to enhance autonomous decision-making in robots.

Quadrotor Fault Estimation and Detection
Fault estimation and detection are important for safe and effective autonomous flight of quadrotors. This project aims to implement different types of fault detection methods for motor or propeller faults or decreases in effectiveness through estimation, external observers, and/or data driven learning methods. The student will need to research and implement different types of fault detection algorithms.
Bonus: PX4 experience, Proven skills in Deep Learning.
Contacts: Jennifer Yeom.

Safety Test Pilot
Autonomous flights are risky due to potential software malfunctions that can cause dangerous maneuvers. Safety Test Pilots provide manual control for hazardous situations and data collection purposes. The interface is pre-programmed, requiring only dexterity for safe operation.
Bonus: Px4 experience and flight controller tuning.
Contacts: Jeffrey Mao.
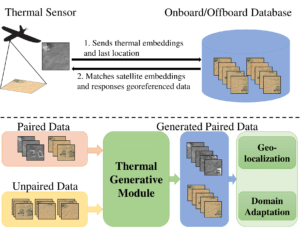
Diffusion model for UAV thermal geo-localization
UAV thermal geo-localization is essential for nighttime GNSS-denied environments. This project aims to use a diffusion model in domain adaptation between satellite RGB images and thermal images from UAVs. The student needs to implement the diffusion model for image translation between the RGB domain and thermal domain for thermal geo-localization.
Bonus: Experience with GAN, Diffusion model, and image translation.
Contacts: Jiuhong Xiao.
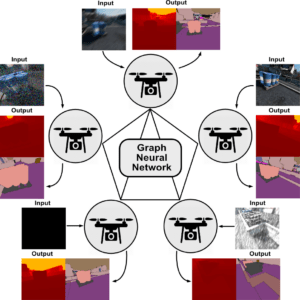
Multi-robot Perception Framework for embedded platform
This project aims to develop a real-world multi-robot perception framework by message passing among robots. The student need to deploy and optimize neural networks on the embedded platform, develop communication protocol between robots.
Bonus: Experience with embedded platform such as NVIDIA Jetson NX.
Contacts: Yang Zhou.
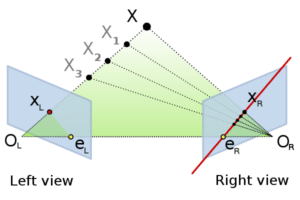
Real-time Depth Estimation for Embedded Platform
Depth Estimation is essential for downstream perception and planning tasks. This project aims to develop a series of real-time depth estimation methods (monocular, stereo) and deploy them on target platforms with different acceleration techniques (CUDA, OpenCL, SNPE) using ROS2.
Bonus: CUDA.
Reference: Disparity, Isaac-ROS-Image-Pipeline, Semi-Global-Matching, PINTO-Model-Zoo.
Contacts: Alessandro Saviolo.
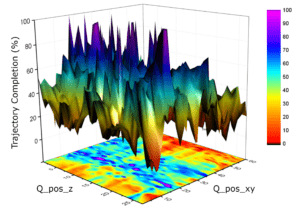
Automatic Tuning of Controllers
Tuning controllers is a tedious and time-consuming process usually done by a human expert. Data-driven techniques can be leveraged to take humans out of the loop. The goal of this project is to advance the state-of-the-art algorithms for automatically tuning controllers for a high-speed flight of quadrotors.
Bonus: Experience with quadrotor flight.
Reference: AutoTune: Controller Tuning for High-Speed Flight.
Contacts: Alessandro Saviolo, Yang Zhou.