

IxLab Recitation 4: Actuators and Mechanisms
Building Process
Since we think the work is quite complicated, I separate the work with my partner Jason. I was responsible for circuit building while he was responsible for the cardboard cutting and fabrication process.
I would introduce the circuit-building process in my documentation post.
Circuits Building
Firstly when I get the H bridge, I plug it into the breadboard. Then, I strictly follow the instructions (even using the same color cables) on the website and connect all the cables.
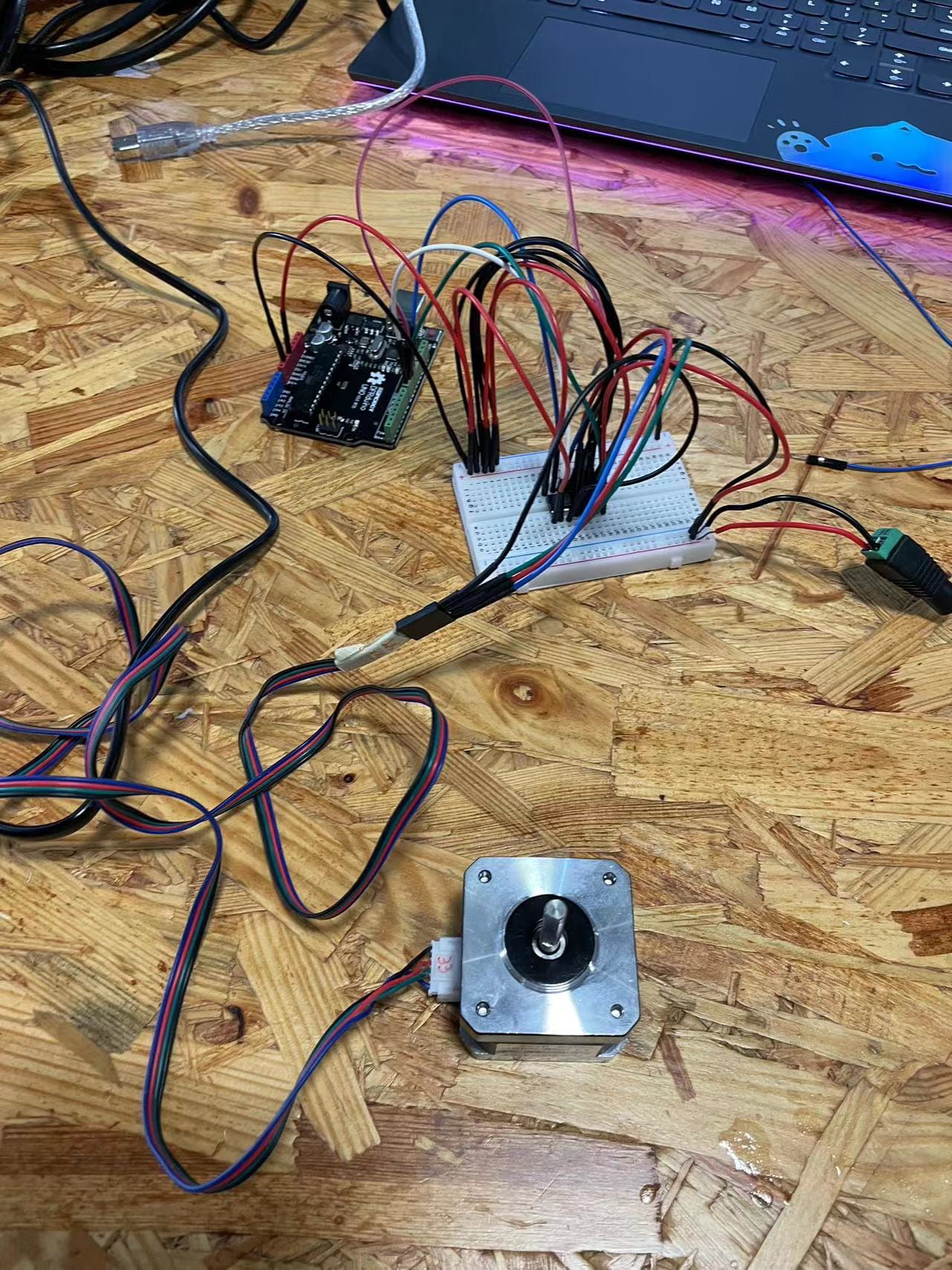
When I upload the example code on the Arduino board. The servo motor doesn’t spin at all. I checked the cable connections many times but didn’t find the problem. I started to consider if the problem was caused by the hardware. Firstly I changed the stepper motor. However, the new stepper still didn’t move at all. Then I changed the computer and the Arduino board but the problem still existed. Finally, we unplug the H-bridge and found the problem:
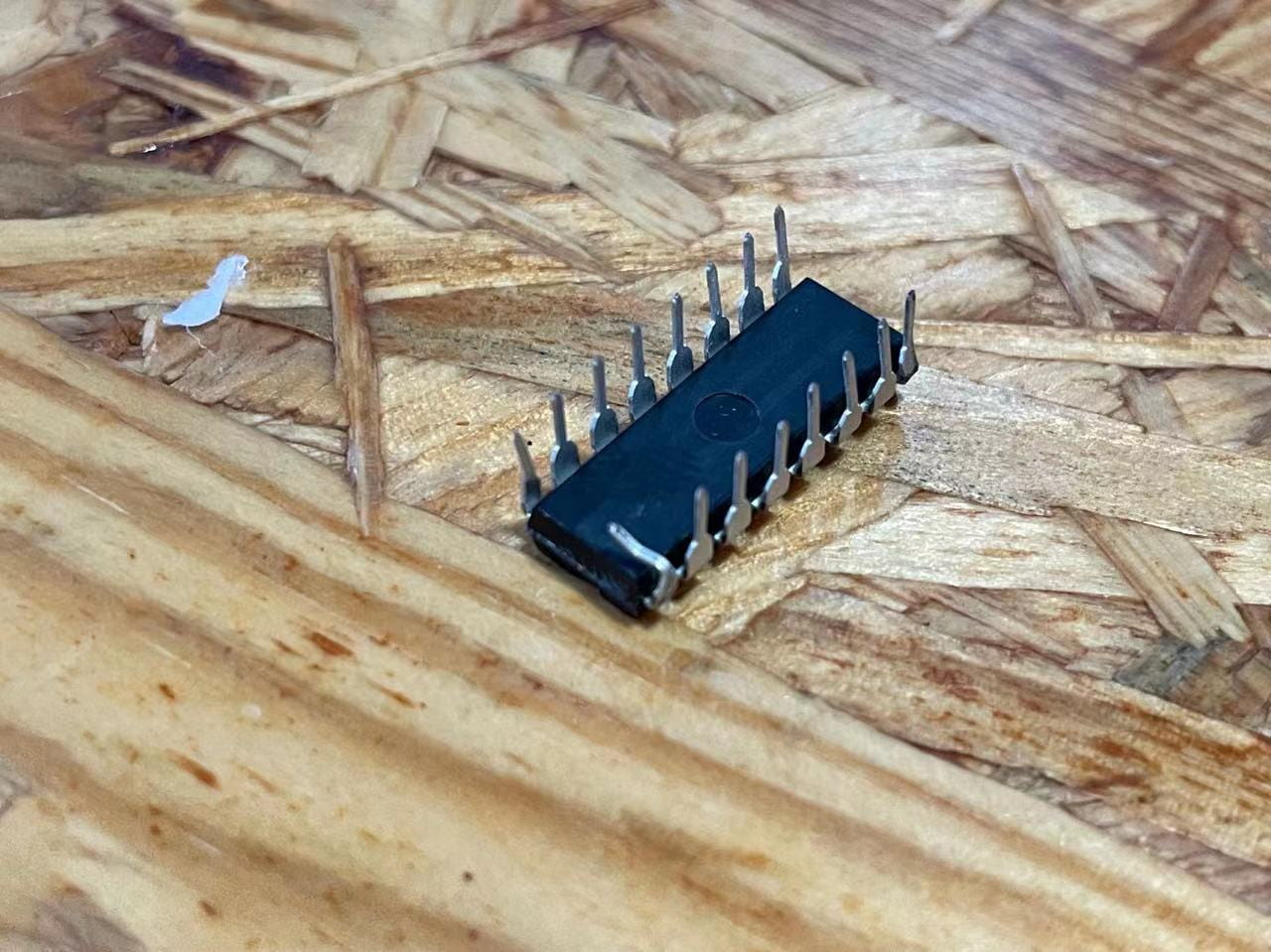
One foot has bent and didn’t plug into the breadboard.
After we changed to a new H-bridge, all the problems are clear. The stepper was working successfully.
Then I installed my circuit with my partner’s shell. It runs very smoothly and fluently.
Here’s our video (due to the time limitation, we haven’t done the decoration yet):
Additional Questions
Question 1: Choose an art installation mentioned in the reading ART + Science NOW, Stephen Wilson (Kinetics chapter). Post your thoughts about it and make a comparison with the work you did during this recitation. How do you think that the artist selected those specific actuators for his project?
I-Wei Huang, Steam Walker, 2006.

A similar point between this project and the work that we’ve done on the recitation is that we all use some specific parts to transmit the power. Really love the sophisticated transmission structure. In my opinion, the author chooses the steam machine to provide the power not only because of his/her love of the steam machine but also because the machine can provide strong power and can fluently transmit to the feet of the robot.
Question 2: What kind of mechanism would you be interested in building for your midterm project? Explain your idea using a sketch (conceptual or technical) with a list of materials that you plan to use. Include details about the ways that you expect the user to embrace in a physical interaction with your project. In particular, explain how would your motor (or motors) with a mechanism will be different than using an animation on a digital screen.
I’m interested in the transmission structure design when building the project. Using different parts to let the power of the servo transmit to the movement.
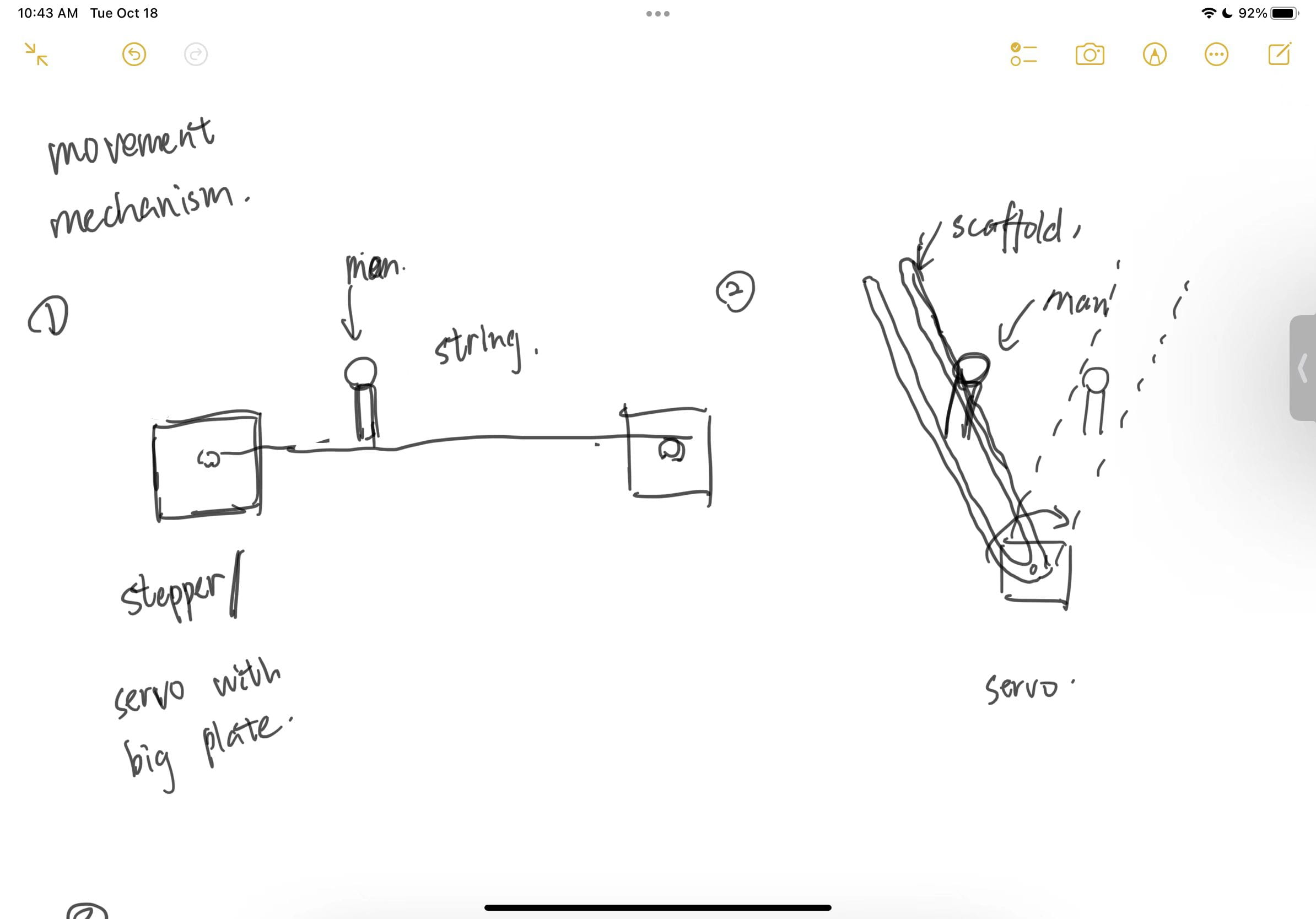
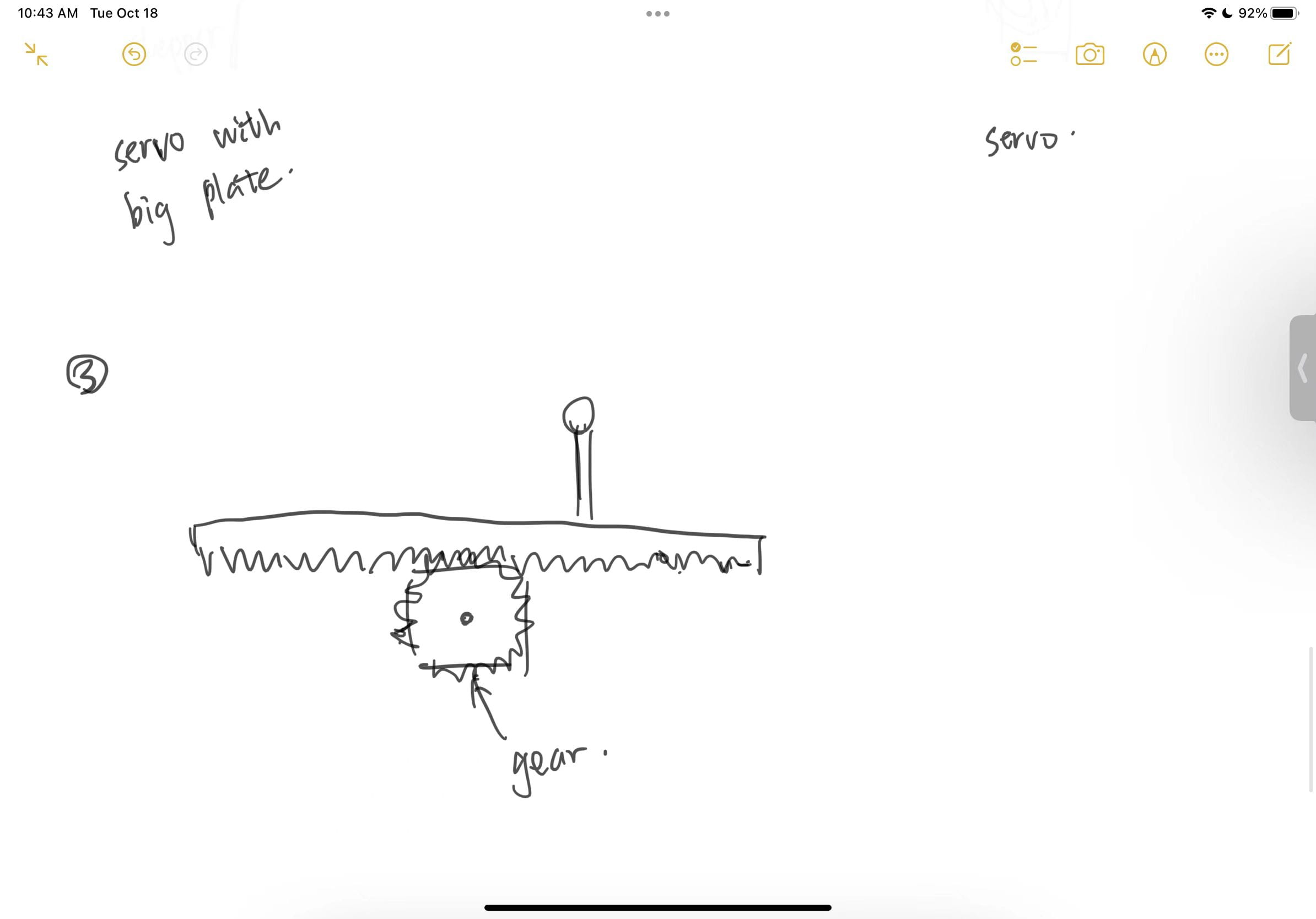
[Draw by Jason]
I think the movement of a mechanical structure can form a sense of reality. People will always think that the things on the screen are far away from us. We want to strengthen the power of our project. In this case, the mechanical structure is the best choice.