
Concept
When I was brainstorming about this project, I was considering some of my favorite things and the first thing that popped into my head was that I missed my 4 dogs back home. I have 2 Dachshunds, a Husky and a Golden Retriever. With this thought in mind, I tried to come up with a project that would remind me of my dogs back home. Unsurprisingly, I came up with a dog. I knew that had neither the time or the skills to make the dog very complicated so I tried to isolate certain characteristics of the dog that I missed the most, my old Dachshund with an attitude and an unhealthy obsession to chicken, Dapple. Every time I would come home she would start barking happily and start wagging her tail. When I pet her she would start to make a high pitched whining sound and wag her tail even faster. The project I will build will emulate the behavior of my dog and hopefully, make someone smile.

Dapple is on the left
Behavior
My cardboard Dapple will have two settings: sensing the presence of something in front of it, and sense when she is being petted. When Dapple senses the presence of something in front of her she will “wake up.” She will wag her tail, play a low tone periodically and “blink” or flash the LEDs. When she senses the presence of someone in front of her and she gets “pet” on the head (light sensor), her tail will wag faster and she will close her eyes in pure bliss (LEDs turn off).
Circuit and Schematic
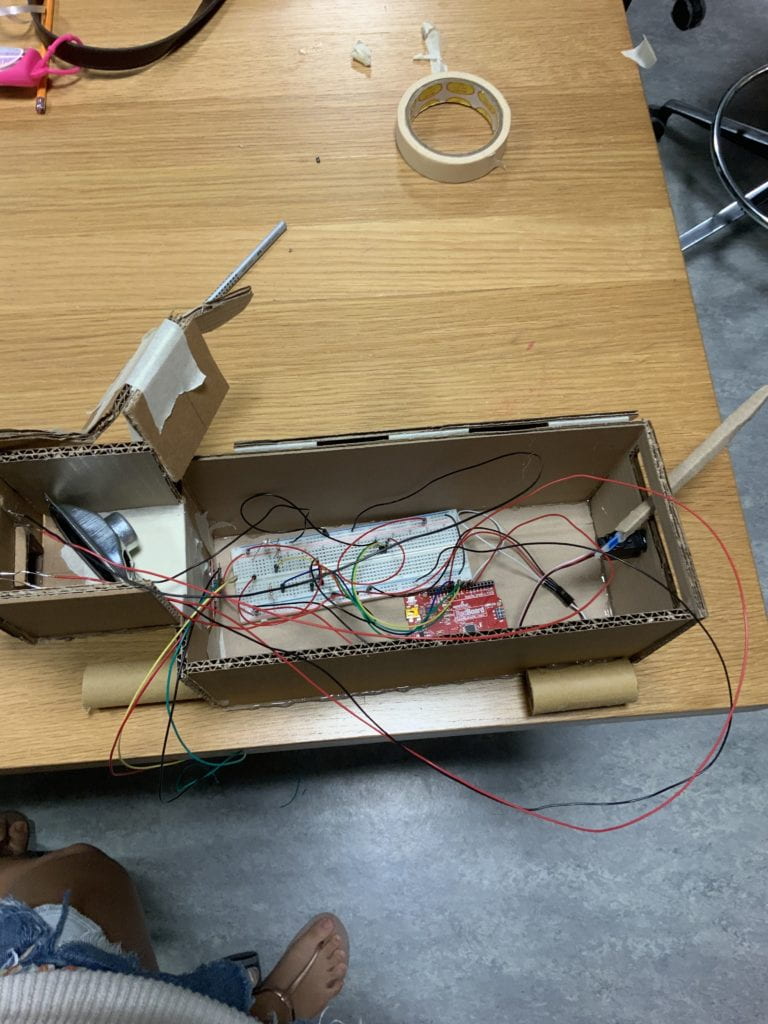
The entire circuit fits into a cardboard container that represents Dapple’s body. The speaker and light sensor are placed in the head of the figure, the breadboard and the Arduino sit in the middle of the body. The servo is attached to the end of the figure with a hole cut for the tail to wag and the distance sensor is in front of the figure.
Schematic
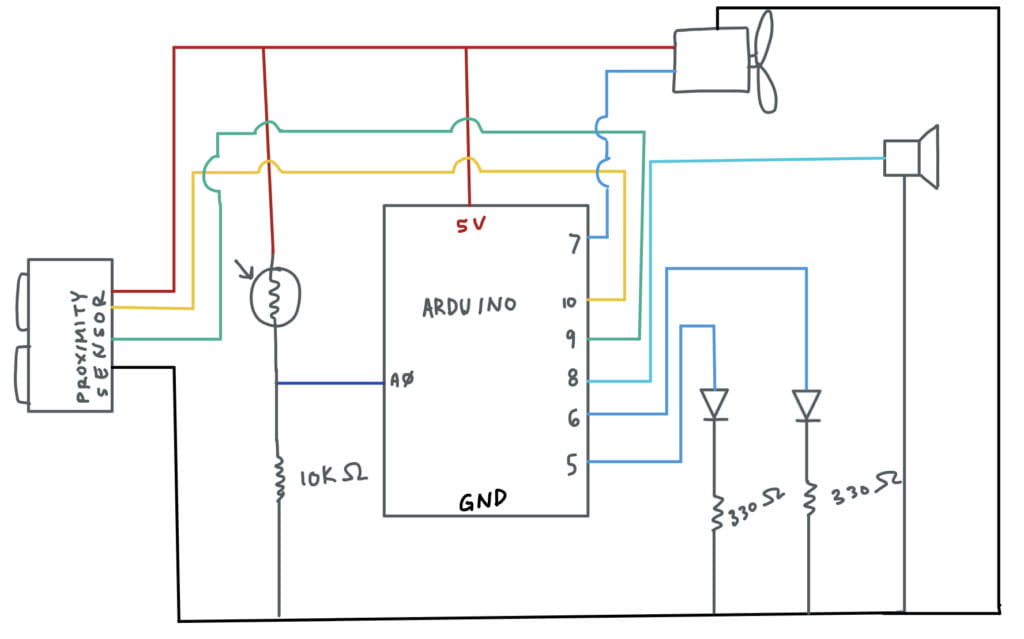
Inputs and Outputs
| Amount | Item |
| 1 | light sensor |
| 1 | distance sensor |
| 1 | servo |
| 2 | LEDs |
| 1 | Speaker |
Discussion
Hardware
The biggest issue with the hardware of the project is that I used stranded wire to solder wires onto the 6-pin female header and as a result, the exposed wires sometimes bumped into each other. It was a similar case on the breadboard. I had to make sure I cut the wires down so that none of the stranded wire would be exposed. The creation of the container itself wasn’t as complicated as I only made use of glue gun, tape and cardboard.

I think I should’ve made the container bigger though because it was quite difficult to maneuver some of the wires around because of the cramped space. I also ran into some issues with pin 11. For some reason, my LED wouldn’t light when it was connected to that pin but worked when I connected to pin 6.
Software
My biggest issue with this code is that I didn’t know how to make the servo move faster when it sensed the light sensor. This was because the servo sweep code made use of classes, which I wasn’t as familiar with. Fortunately, with some help from Adham, I was able to increase the speed of sweep. Learning the code for the sweep function and trying to understand it to the best of my extent took most of my time when it came to this project.
Code
Main Code
#include "pitches.h"
#include "sweeper.h"
const int trigPin = 9;
const int echoPin = 10;
const int LEDYELLOW = 5;
const int LEDYELLOW2 = 6;
const int lightsensor = A0;
int ledState = LOW;
unsigned long previousMillis = 0;
const long interval = 1000;
long duration;
int distanceCm, distanceInch;
Sweeper sweeper1(15);
void setup() {
sweeper1.Attach(7);
Serial.begin (9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(LEDYELLOW, OUTPUT);
pinMode(LEDYELLOW2, OUTPUT);// used to test the distance sensor and see if the LED will turn on
pinMode(lightsensor, INPUT);
}
void loop() {
int Lsensor = analogRead(lightsensor);
Serial.println(Lsensor);
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distanceCm = duration * 0.034 / 2;
distanceInch = duration * 0.0133 / 2;
//used to check the distance and see if the sensor is working
Serial.print("Distance: ");
Serial.print(distanceInch);
Serial.println(" inch");
//tests if light will turn on if something approaches it
if (distanceInch < 30) {
if (Lsensor < 800) { //increase increment (wagging of tail), stop blink sweeper1.Increase(); sweeper1.Update(); unsigned long currentMillis = millis(); if (currentMillis - previousMillis >= interval) {
// save the last time you blinked the LED
previousMillis = currentMillis;
// if the LED is off turn it on and vice-versa:
if (ledState == LOW) {
ledState = HIGH;
tone(8, NOTE_C7, 8);
} else {
ledState = LOW;
noTone(8);
}
}
} else { //reset sweeper speed (wagging of tail slows), blink light again, play lower note
sweeper1.Update();
unsigned long currentMillis = millis();
if (currentMillis - previousMillis >= interval) {
// save the last time you blinked the LED
previousMillis = currentMillis;
// if the LED is off turn it on and vice-versa:
if (ledState == LOW) {
ledState = HIGH;
tone(8, NOTE_C6, 8);
} else {
ledState = LOW;
noTone(8);
}
// set the LED with the ledState of the variable:
digitalWrite(LEDYELLOW, ledState);
digitalWrite(LEDYELLOW2, ledState);
}
}
} else {
digitalWrite(LEDYELLOW, LOW);
digitalWrite(LEDYELLOW2, LOW);
noTone(8);
}
}
Pitches Library
/************************************************* * Public Constants *************************************************/ #define NOTE_B0 31 #define NOTE_C1 33 #define NOTE_CS1 35 #define NOTE_D1 37 #define NOTE_DS1 39 #define NOTE_E1 41 #define NOTE_F1 44 #define NOTE_FS1 46 #define NOTE_G1 49 #define NOTE_GS1 52 #define NOTE_A1 55 #define NOTE_AS1 58 #define NOTE_B1 62 #define NOTE_C2 65 #define NOTE_CS2 69 #define NOTE_D2 73 #define NOTE_DS2 78 #define NOTE_E2 82 #define NOTE_F2 87 #define NOTE_FS2 93 #define NOTE_G2 98 #define NOTE_GS2 104 #define NOTE_A2 110 #define NOTE_AS2 117 #define NOTE_B2 123 #define NOTE_C3 131 #define NOTE_CS3 139 #define NOTE_D3 147 #define NOTE_DS3 156 #define NOTE_E3 165 #define NOTE_F3 175 #define NOTE_FS3 185 #define NOTE_G3 196 #define NOTE_GS3 208 #define NOTE_A3 220 #define NOTE_AS3 233 #define NOTE_B3 247 #define NOTE_C4 262 #define NOTE_CS4 277 #define NOTE_D4 294 #define NOTE_DS4 311 #define NOTE_E4 330 #define NOTE_F4 349 #define NOTE_FS4 370 #define NOTE_G4 392 #define NOTE_GS4 415 #define NOTE_A4 440 #define NOTE_AS4 466 #define NOTE_B4 494 #define NOTE_C5 523 #define NOTE_CS5 554 #define NOTE_D5 587 #define NOTE_DS5 622 #define NOTE_E5 659 #define NOTE_F5 698 #define NOTE_FS5 740 #define NOTE_G5 784 #define NOTE_GS5 831 #define NOTE_A5 880 #define NOTE_AS5 932 #define NOTE_B5 988 #define NOTE_C6 1047 #define NOTE_CS6 1109 #define NOTE_D6 1175 #define NOTE_DS6 1245 #define NOTE_E6 1319 #define NOTE_F6 1397 #define NOTE_FS6 1480 #define NOTE_G6 1568 #define NOTE_GS6 1661 #define NOTE_A6 1760 #define NOTE_AS6 1865 #define NOTE_B6 1976 #define NOTE_C7 2093 #define NOTE_CS7 2217 #define NOTE_D7 2349 #define NOTE_DS7 2489 #define NOTE_E7 2637 #define NOTE_F7 2794 #define NOTE_FS7 2960 #define NOTE_G7 3136 #define NOTE_GS7 3322 #define NOTE_A7 3520 #define NOTE_AS7 3729 #define NOTE_B7 3951 #define NOTE_C8 4186 #define NOTE_CS8 4435 #define NOTE_D8 4699 #define NOTE_DS8 4978
Servo Sweep Class Library
#include
class Sweeper {
Servo servo; // the servo
int pos; // current servo position
int increment; // increment to move for each interval
int updateInterval; // interval between updates
unsigned long lastUpdate; // last update of position
public:
Sweeper(int interval)
{
updateInterval = interval;
increment = 5;
}
void Attach(int pin)
{
servo.attach(pin);
}
void Detach()
{
servo.detach();
}
void Update()
{
if ((millis() - lastUpdate) > updateInterval) // time to update
{
lastUpdate = millis();
pos += increment;
servo.write(pos);
Serial.println(pos);
if ((pos >= 150) || (pos <= 3)) // end of sweep { // reverse direction increment = -increment; } } } //Increases increment speed void Increase() { if ((millis() - lastUpdate) > updateInterval) // time to update
{
lastUpdate = millis();
pos += 2*increment;
servo.write(pos);
//Serial.println(pos);
if ((pos >= 150) || (pos <= 30)) // end of sweep
{
// reverse direction
increment = -increment;
}
}
}
};
Great work all around.
When you get code from somewhere (or someone) else, it’s very important to indicate that in the comments. I see you used the servo sweep class from Adafruit, which is great, but you should have put a comment in the code indicating where you got it.